2023年3月王嘉宏副教授在SCI二区期刊Mathematics发表题为"An Efficient End-to-End Obstacle Avoidance Path Planning Algorithm for Intelligent Vehicles Based on Improved Whale Optimization Algorithm"的论文。
发布者:刘石坚
发布时间:2023-12-08
浏览次数:107
实验室核心成员王嘉宏副教授于2023年3月在SCI二区期刊Mathematics发表题为"An Efficient End-to-End Obstacle Avoidance Path Planning Algorithm for Intelligent Vehicles Based on Improved Whale Optimization Algorithm"的论文。
论文简介:
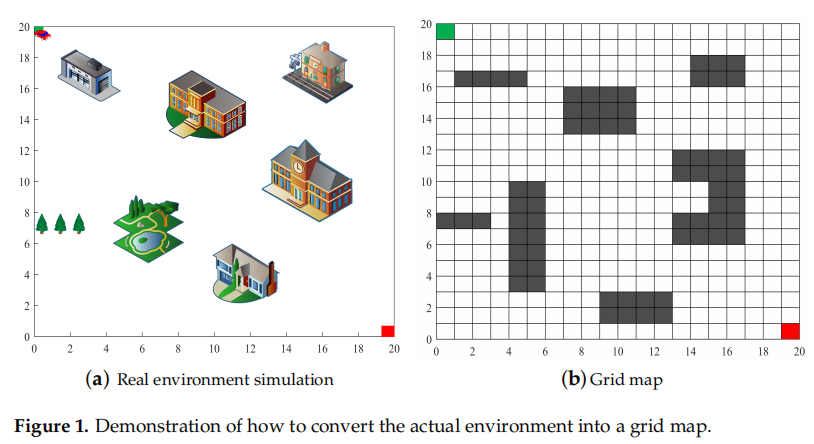
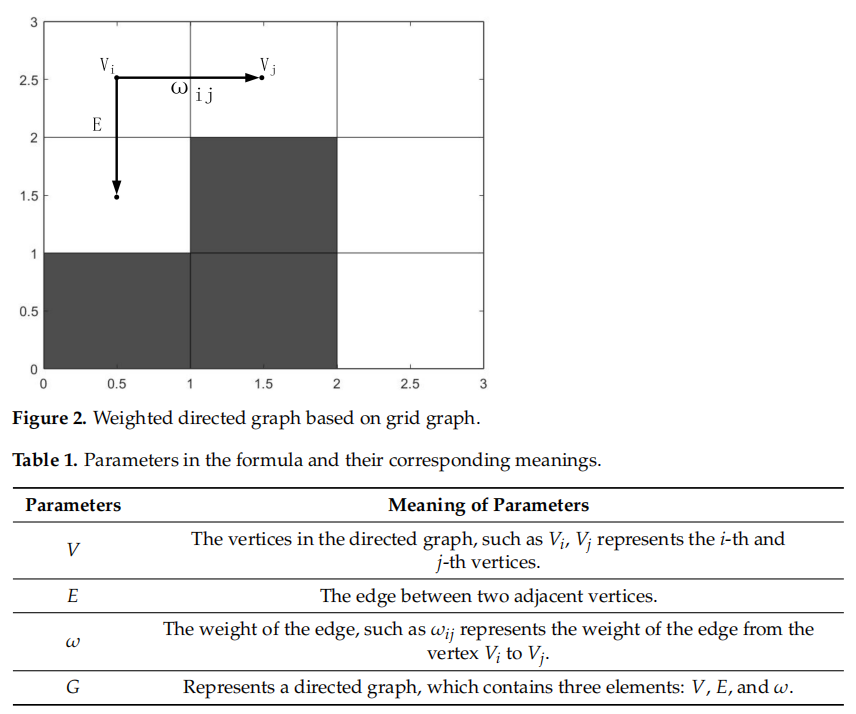
智能车辆的端到端避障路径规划一直是一个广泛研究的课题。针对求解算法中全局优化能力弱、容易陷入局部优化、收敛速度慢的典型问题,本文在鲸鱼优化算法(WhaleOptimizationAlgorithm)的基础上,提出了一种高效的优化方法。我们提出了一种自适应调整机制,该机制可以在鲸鱼优化算法的迭代过程中动态修改搜索行为。同时,为了更好的计算全局最优和局部最优,我们引入了一个可控变量,该变量可以根据特定的路由场景进行重置,以进一步更新搜索个体的位置。在数值实验中,我们将所提出的算法与以下六种著名的群体智能优化算法进行了比较:粒子群优化算法(PSO)、蝙蝠算法(BA)、灰狼优化算法(GWO)、蜻蜓算法(DA)、蚂蚁狮子算法(ALO)和传统的鲸鱼优化算法(WOA)。与现有的一些方法相比,我们的方法对典型的23个基准函数产生了更好的结果,也表现出更快的收敛性。在关于智能车辆端到端避障路径规划的一系列测试实例中,我们所提出的新算法在最优距离的求解上平均提高了18.95%,在算法稳定性方面则是平均提高77.86%。
相关图片: